Table of Contents
Instancias
Para la asignación, creación y más detalles sobre las instancias, se recomienda leer el siguiente documento: Detalles sobre Instancias .
Herramientas de instancias
View last Screenshot
Captura de pantalla
Para poder utilizar esta herramienta se debe configurar en el archivo “.ini” de nuestro cliente
orquestador.

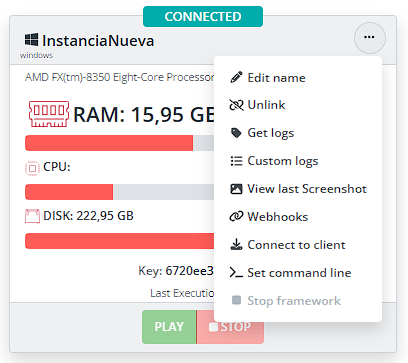
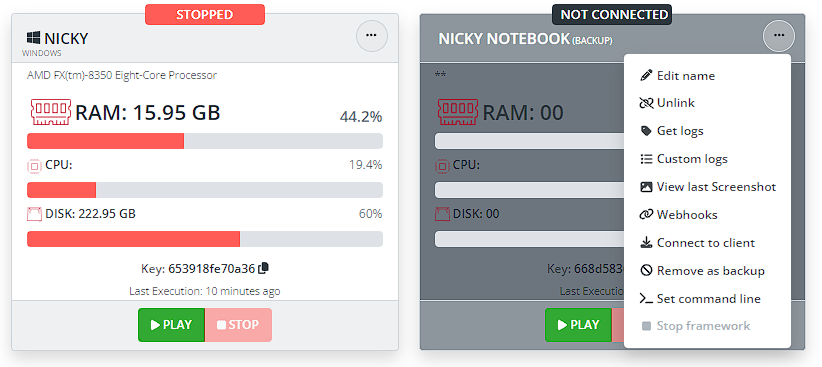
Una vez configurada podremos acceder a ella desde las herramientas de la instancia.
Si no tenemos ninguna captura de pantalla previa, nos saldrá el siguiente mensaje:
Para mandarle una petición al orquestador de una captura de pantalla nueva se debe
seleccionar el botón “REFRESH”.
Dicho procedimiento no es automático y puede tardar algunos segundos.
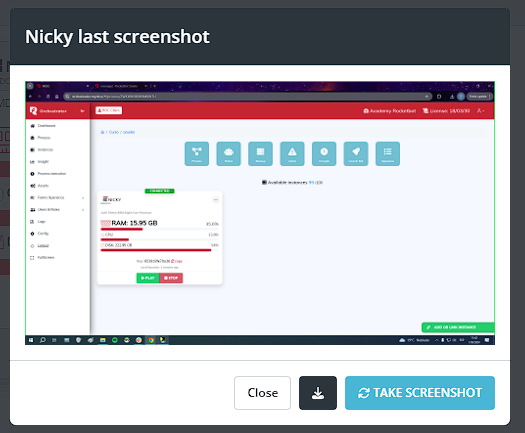
Si la instancia está conectada al cliente orquestador obtendrá una captura de pantalla y la
mostrara en el mismo modal. Pero si dicha instancia no está conectada a ningún
dispositivo/cliente orquestador, no tomara la captura.
Dicha captura de pantalla es general de la instancia y no del proceso. Por ende si tengo la
misma instancia en otro proceso, se visualizara la misma captura de pantalla.
Una vez que tengamos la captura, podremos descargarla con el icono que aparece en pantalla.
También podremos solicitar una nueva captura haciendo click en “TAKE SCREENSHOT”
nuevamente.
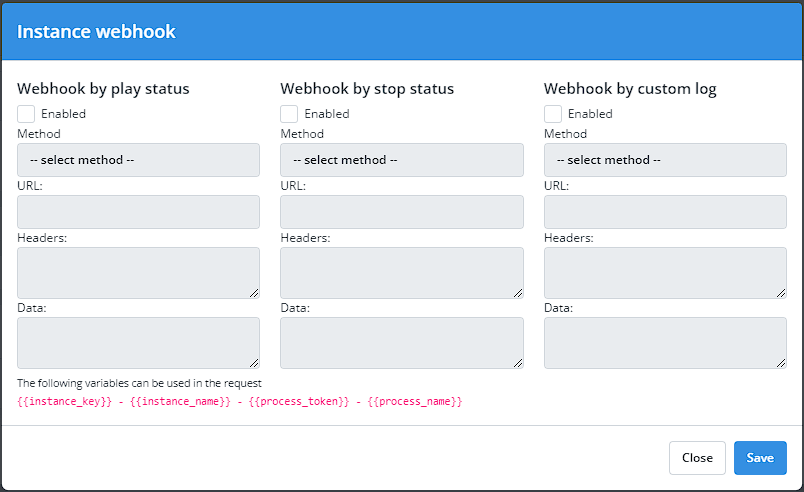
Webhooks
Son llamadas a APIs que realiza el orquestador bajo 3 condiciones siempre y cuando estén
habilitadas y configuradas:
1- Realiza la consulta a la API cuando se ejecuta un robot (No cuando inicia la instancia,
sino recién cuando el orquestador encuentra el robot y lo ejecuta) (Cuando la barra de
la instancia se pasa a estado amarilla).
Ej: Enviar robot en ejecución a una API para crear un listado de varios robots y sus
instancias responsables.
2- Realiza la consulta a la API cuando se termina de ejecutar un robot.
Ej: Enviar robots a una API para crear un listado de robots ya ejecutados/procesados.
3- Realiza la consulta cuando llega un mensaje personalizado (“custom log”) asociado a
dicho proceso.
Ej: Enviar los mensajes personalizados que obtenemos en nuestro proceso a una API.
Configuración:
- “Enabled”: Habilitar/Deshabilitar Webhook.
- “Method”: Seleccionar el método de envió de información:
- “Get” (Se inhabilita el cuadro “Data”, ya que se debe proporcionar la
- información en la URL)
- “Post”
- “URL”: Se debe proporcionar la URL de la API a la cual se va a consultar.
- “Headers”: Configuración de las cabeceras de dicha API.
- “Data”: Información la cual se enviara a la API, esta debe enviarse en formato Json. Algunas variables que se pueden usar: {{instance_key}} /{{instance_name}}/{{process_token}}/{{process_name}}/{{data}}
Get Log

Historial de comandos del robot:
Esta sección permite acceder al registro completo de todos los comandos que han sido enviados al robot, ya sea que estén en proceso de ejecución o que ya se hayan completado.
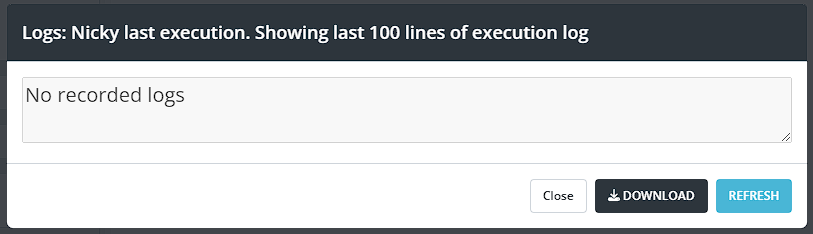
Estado de la conexión:
- Sin conexión:
Si el robot no ha sido ejecutado previamente o si la última ejecución falló al intentar conectarse, se mostrará un modal que indica la falta de conexión.
- Con conexión:
Una vez establecida la conexión, se desplegará información detallada sobre el estado actual del robot y los comandos ejecutados.
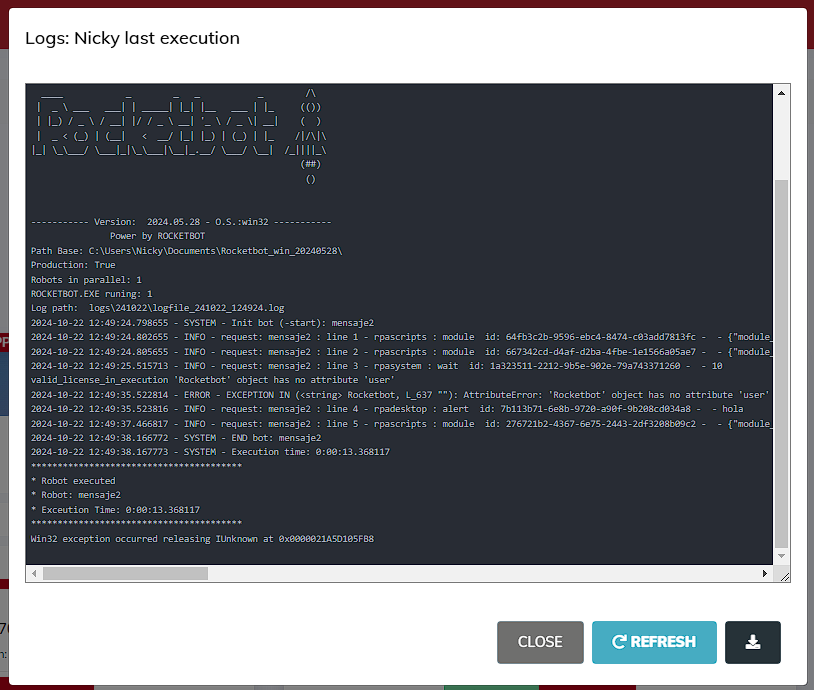
Información disponible cuando hay conexión:
Licencia: Muestra la licencia activa que poseemos para el uso del robot.
Robot utilizado: Indica cuál de los robots disponibles está siendo utilizado en la ejecución actual.
Lista de comandos y su estado: Presenta una lista detallada de todos los comandos enviados al robot junto con su estado (por ejemplo, ejecutado, en progreso, fallido).
Tiempo de ejecución: Muestra el tiempo total que ha tomado la ejecución de los comandos.
Remove as backup
En el caso de que tengamos una instancia como backup, podremos convertirla en una instancia normal con la herramienta “remove as backup”
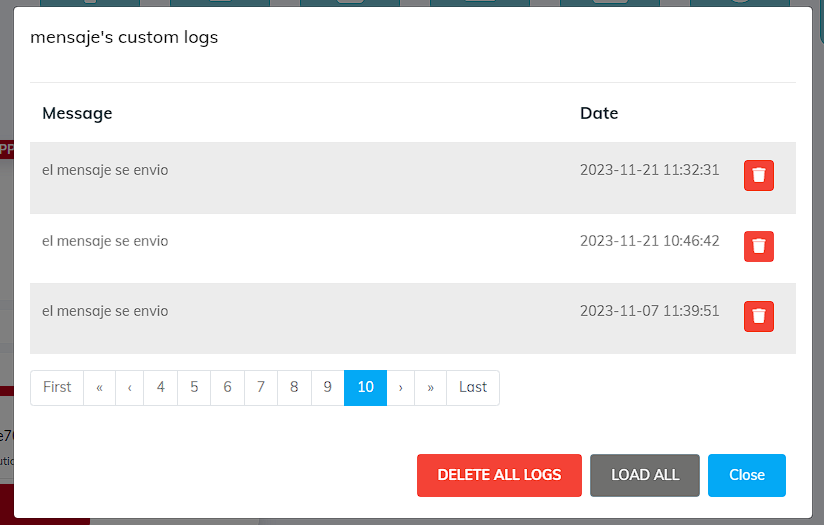
Custom logs
Utilizando el módulo “Rocket Logs”, podemos enviar mensajes tanto internos al orquestador como a correos electrónicos predefinidos. Estos mensajes son útiles para recibir notificaciones y tener control sobre los comandos de nuestros robots.
Por ejemplo, un comando “Custom Log” con los mensajes “El robot comenzó” y “El robot finalizó” nos indicará el estado del robot. Además de enviar estos mensajes al orquestador, también es posible enviarlos por correo electrónico.